
New algorithm keeps drones from colliding in midair
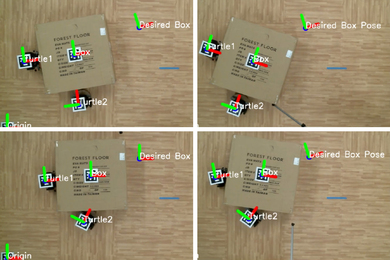
Researchers create a trajectory-planning system that enables drones working together in the same airspace to always choose a safe path forward.
Researchers create a trajectory-planning system that enables drones working together in the same airspace to always choose a safe path forward.

New repair techniques enable microscale robots to recover flight performance after suffering severe damage to the artificial muscles that power their wings.

Robotic parts could be assembled into nimble spider bots for exploring lava tubes or heavy-duty elephant bots for transporting solar panels.

By keeping data fresh, the system could help robots inspect buildings or search disaster zones.

Saverio Cambioni discusses new results revealing the redirected asteroid Dimorphos to be a dust-trailing rubble-pile.

Senior Sylas Horowitz tackles engineering projects with a focus on challenges related to clean energy, climate justice, and sustainable development.

A new experiential learning opportunity challenges undergraduates across the Greater Boston area to apply their AI skills to a range of industry projects.

Study shows that if autonomous vehicles are widely adopted, hardware efficiency will need to advance rapidly to keep computing-related emissions in check.

For Leon Villegas SM ’08, MBA ’08, a journey of lifelong learning brought him from Mexico to building autonomous air taxis, with a key stop at MIT.

The device could help scientists explore unknown regions of the ocean, track pollution, or monitor the effects of climate change.

Inspired by a fiddler crab eye, scientists developed an amphibious artificial vision system with a panoramic visual field.

The MIT Mobility Initiative welcomes five inaugural industry members to advance safe, clean, and inclusive mobility.

The second AI Policy Forum Symposium convened global stakeholders across sectors to discuss critical policy questions in artificial intelligence.

MIT scientists unveil the first open-source simulation engine capable of constructing realistic environments for deployable training and testing of autonomous vehicles.
A new general-purpose optimizer can speed up the design of walking robots, self-driving vehicles, and other autonomous systems.